
GPS魚群探知機の基礎知識
 魚群探知機の仕組み
魚群探知機の仕組み
|
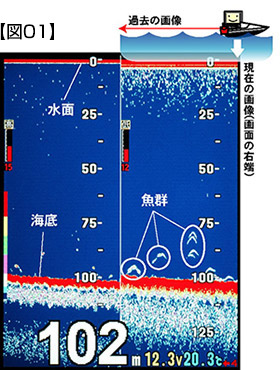
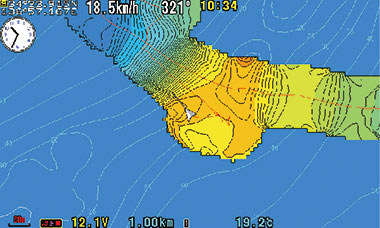
魚群探知機は超音波を利用しています。 「超」音波とは人間の耳に聞こえない高い周波数をもつ音波のこと、人間の耳には聞こえないというだけでその性質は聞こえる音とほとんど変わりません。 音は山の上で対面の山に向かって「ヤッホー」と叫んだとき遅れて聞こえる現象「やまびこ」が有名ですが、音には物にぶつかると反射して戻ってくる性質があります。 壁が近ければ帰ってくるまでの時間は短く、遠ければ長くなります。また、壁が硬いものでできていれば、投げたときとそれほど変わらない威力で戻ってきますが、柔らかいものにぶつければ、力が吸収されて、威力は弱まります。 このように魚群探知機は超音波の性質を利用し、跳ね返ってきた超音波の戻りの時間と音の強弱を解析し、グラフ化(色分け)したものが図01のような映像になります。 |
上の説明では、音の性質はほとんど変わらないと記述しましたが、ゆいいつ音には「ドレミファ・・・」という音階があるように、周波数=「音の高さ」という空気を振動させる性質が周波数によって異なります。魚群探知機はこの周波数を1種類または数種類使い分けてデータ解析に役立てています。
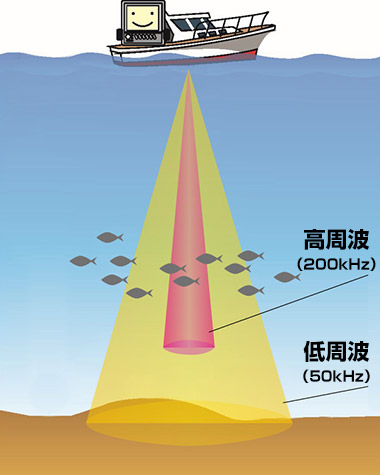
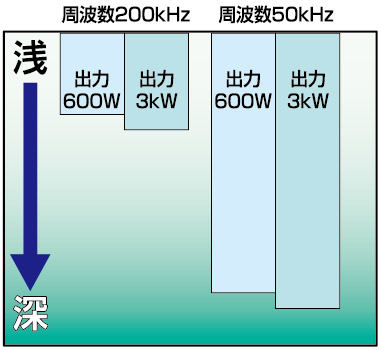
主にプレジャーで使われる魚群探知機は2種類(50kHz、200kHz)、 周波数を使い分けることで以下のようにデータの解析力を高めることが出来ます。
| 50KHz | 200KHz |
|
|
|
|
|
|
魚探出力は音の強さを表します。出力の値を大きくすると遠くまで音を届けることが出来ます。 ただ、200kHzなどの高い周波数は出力を600Wから1kWや2kWに上げても、期待するほど深くまで飛ばせられないでしょう。 もっと深いところのデータが欲しいのであれば、50kHzなど低周波でなければ音波を深いところまで届かせることが出来ません。海水濃度にも影響されますが200kHzなら水深100m〜200mまでが限界と考え、それより深いところでは50kHzのような低い周波数にした方が効率的です。 |
近年ではデジタル解析技術が進み、ただ魚探の反応を画面上に表示するだけでなく各社メーカーで様々な付加機能が搭載されたデジタル魚探の開発が進んでいます。
主な機能としてノイズの除去、弱い反応の鮮明化、魚サイズの表示などがあります。
また超音波の周波数(音の高さ)を細かく変えながら発信する魚探(チャープ魚探)、400-800kHzの高い周波数を用いて、水草(流木)や岩等を見分けるダウンスキャン/サイドスキャンもデジタル解析技術と並行して開発され、より多くの情報が得られるようになりました。
 振動子の取付け
振動子の取付け
振動子とは超音波を発射して反射してきた音波を感知するセンサーです。(各社メーカーで名称が変わり送受波器や発振器とも言われ、漁師さんからはアシとも言われます。)
振動子の取り付けは様々な方法はありますが、振動子の底面と水の間に遮るものがないほど魚探の感度は良くなります。
船を上架させる手間もなく楽に取り付け出来ることから船底の上から貼付る、インナーハルやシリコン接着の方法が良く取られていますが、船底の厚さの分が障害物になりますので音波が減衰します。
また、同じく船底の上から取り付けするインナーハルはシリコン接着と比較しますと、シリコン接着は弾性体の接着材を用いるためインナーハルよりも減衰率は大きくなります。
| 振動子を水中に直接浸けた状態を100とした場合の取付方法ごとの感度の違い | ||
| 水中直浸け | エレキモーター取付・トランサム取付など | 100 |
| 船底貼付 | インナーハルキット使用 | 80 |
| イケス取付 | イケス内部に貼付 | 70 |
| 船底貼付 | シリコンで船底に貼付 | 60 |
| 万能パイプ取付金具で取り付ける方法 (HONDEX) | |
| 対応振動子タイプ | 【HONDEX】TD02・TD03・TD43・TD04A・TD04C・TD02+TD43・TD03+TD43・TD27・TD25・TD28 |
| 万能パイプ取付金具タイプ | ▶BP05(耐衝撃プラスティックパイプ)▶BP10(ステンレスパイプ) |
| メリット | 工具など使わず、船体に加工もなく簡単に取り付けできます。 水中直浸けなので最高の感度を得られます。 ゴムボートなどの小型ボートやレンタルボートといった取付加工しにくいボートに最適です。 |
| デメリット | 万能パイプをボートから下して使用される場合は、十分速度を落として走行してください。 これを守らないと破損や脱落の恐れがあります。 |


| トランサム取付 (HONDEX・FURUNO) | |
| 対応振動子タイプ | 【HONDEX】TD02・TD03・TD43・TD04A・TD04C・TD27・TD25 【FURUNO】525-5PWD |
| メリット | 専用のステーを使ってがっちり固定するので走行中も魚探を掛けられます。 水中直浸けなので最高の感度を得られます。 |
| デメリット | 船外機との距離が近いため、船外機の種類によってはノイズの影響を受けることがあります。 |
・船底勾配と平行に取りつけてください。
・船底勾配が10度以上あると、音波の発射方向が不適切になってしまいます。ストライプ(竜骨)部に取り付けをしてください。
・振動子とトランサムの間に隙間がある場合は必ずパテで埋めてください。(※TD25はパテ埋めの必要はありません。)
・振動子底面と船底の間に段差があると気泡を巻き込み易くなり、ボートスピードが上がると映らなくなります。
| 船底貼付 (HONDEX・FURUNO・FUSOELE) | |
| 対応振動子タイプ | 【HONDEX】TD03・TD43・TD04A・TD04C・TD27・TD25・TD28 【FURUNO】520-5PSC・520-5PSD 【FUSOELE】丸型振動子 |
| メリット | 穴あけなどをせずに簡単に設置できます。 |
| デメリット | 2重底の船体や船底が厚過ぎる場合はこの方法で取付ができません。 船底の勾配がきつい場合はインナーハルキットを使用します。シリコン接着剤よりもインナーハルを使用した方のが高い感度が得られます。 |
* 接着面を240番程度のサンドペーパーでよく磨き、シンナーなどで接着面の油、水分、汚れをきれいに拭いてから、シリコン接着剤または2液性エポキシ接着剤で接着します。
* 気泡が接着面に入らないように充分押さえて取付けて下さい。
* FRP船で船底が単層(10mm以下)の船のみ有効です。2重底の船だと映りません。
* 接着する前に、ある程度水深のある場所で船底と振動子の間に水を付け(空気が間に入らないように)一番よく映る場所を決めてから固定すると良いです。
* ゴムボートの船底には入歯安定剤の「ポリグリップ」で貼り付けると収納時に取り外しできます。
* 船底勾配の大きな船はインナーハルの使用を推奨します。
* 直接シリコン接着剤で貼り付けるよりも良好な感度を得られます。
* インナーハルキットの円筒部分は船底勾配に合わせてカットしてご使用ください。
* イケス内に取り付ける方法もあります。
* 音波の振動がイケス全体で緩衝されてしまいますので、感度はシリコン接着よりも落ちてしまいます。
* 船体に穴を開けたり、接着剤を塗布して傷めてしまうことがありません。
* 振動子と船底面との隙間は、なるべく少なくすると良いです。

|
振動子の取付を船底貼付、イケス取付の方法では超音波の感度が減衰してしまいます。
リガーマリンはイケスのスカッパーに着目し、スカッパーに装着できるスルハルキットを開発しました。 これにより、水中直漬け同様に最大感度で得られエンジンとの距離も離れるためノイズ影響も低くなります。 * FURUNO/KODENタイプ、HONDEX/ROYALタイプの2種類があり4メーカーに対応。 * 取り外しも可能ですので海藻などが付着してもメンテナンスも簡単に行えます。 ※スカッパーはヤンマー製SRスカッパーのみ適合、その他のスカッパーには適合しません。 |
|
スカッパー構造スルハルキットの特徴 スカッパーの構造を活用し、送受波機をイケス内に装備することで簡単スルーハル装備を実現。 高音波の減衰を避け高感度探知を手軽に行いたい方や、海底判別機能を活用したい方におすすめ! 不要時には簡単に取り外せお手入れも簡単です。 |



|
* 低価格、簡単にセット!ゴムボートやスモールボートの魚探、センサーポールを一ヶ所でセットできます。 * センサーポールは不要時回転させて、水中から簡単に上げる事が出来ます。 * センサー取付け部は15mm間隔で3ヶ所、M4ネジ2本付き。 * クランプ幅は8〜70mm/クランプ深さ100mm、センサー取付けポールはアルミパイプ16φ-650L |

[クランプ部]
|

[高さ調整機能部]
|

[クランプ部]
|
||

[センサー取付部]
|

[モニター取付部]
|

[モニタープレート取付部]
|
|
振動子取付参考図 (HONDEXの場合) [センサー取付け部] ・15mm間隔×3ヶ所 ・M4ネジ×2本付き |

|

[TD04A]
|

[SK04+TD27]
|

[SK05+TD28]
|
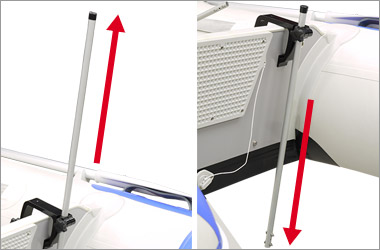
センサークランプライトは上下移動のみ。
|
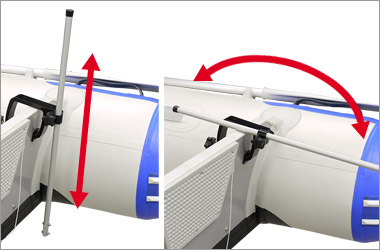
センサークランプライト、チルトは上下移動に加えて、回転してはね上げることもできます。
|
 用語解説
用語解説
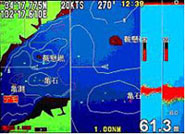
HONDEXプロッタ画面
[2画面表示+魚探併画] |
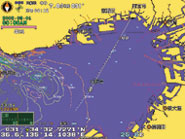
FUSOプロッタ画面
|
GPS(グローバル・ポジショニング・システム)とは、受信端末がある緯度経度を測定するためのシステムです。
GPSは元々米軍が軍用目的に打ち上げたGPS衛星を民間商用として利用したもので、そこから発信されるデータを基に受信端末が高度な計算処理によって緯度経度を特定しています。
この点の数が8000ポイント、10000ポイントとして表されます。
カーナビでは当たり前の機能ですが、実際カーナビのように滑らかに画面が動くものは少なく、90度ずつしか地図が回転しないものが多いのが現状です。
自船位置、速度、方位、残り距離、到着時間などをデジタル表示します。
左下の枠内に目的地番号と、緯度経度、方位、残り距離数を表示します。
ルート航法は予め作成されたルートに沿って航行する方法です。
DGPSは衛星からの電波に加え、地上波の無線局からの電波と2方向から位置を測定しており、測位誤差は10分の1と非常に精度が高いことが特徴です。
※海上保安庁から2019年3月1月をもってディファレンシャルGPS(DGPS)が廃止されます。
今後は準天頂衛星「みちびき」によるGPS測位の精度向上が見込まれ、DGPSの必要性が低下したためです。
すでにDGPSアンテナを所有している場合には、地上基地局からのDGPS信号が途絶えますが通常のGPS衛星からの電波は継続して受信が可能です。
日本では、ひまわりの後継機である運輸多目的衛星MTSAT(エムティーサッ ト)を利用した衛星補強システムMSAS(エムサス)が2007年9月より運用されています。
また、米国ではWAAS(ワース)、欧州ではEGNOS(イグノス)と呼ばれています。
- 特長1・・・いままでのDGPSでは補正データを受信できなかった場所でもGPS衛星と静止衛星が受信可能な場所ならどこでも利用できます。
- 特長2・・・静止衛星とGPS衛星の電波が同じ周波数であるため、従来のDGPSアンテナに比べて小型で安価となります。
独立縮尺切換は、異なる縮尺率で2つの地図を併画することができます。
GPS衛星の座標位置情報と、魚探振動子から計測した水深データを組み合わせてマップ画面に海底地形を描画する機能です。
海上を走らせるだけで海底の起伏が自動で描かれるため、収録したエリアが増えていくほど釣りの好ポイントが分かりやすくなります。
[ホンデックス(デプスマッピング)]
|

[ガーミン(クイックドローコンターズ)]
|
ノイズの除去、深い場所の反応を鮮明化、おさかなサイズ、底質判別機能などが挙げられ、現在、デジタル魚探はどのメーカーともにその技術は発展途上中で新機能の開発が進められています。
|
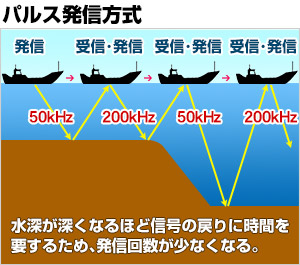
従来の魚探(パルス発信方式)とは?
現在、国内メーカーは200kHzの単周波、または50kHz/200kHz等の2つの異なる周波数の超音波を交互に発信するパルス発信という仕組みが広く用いられています。パルス発信は周波数が一定で決められているため、前後に発信した超音波信号と区別できるよう、超音波を発信した後は次の発信をすぐに行うことができません。超音波が跳ね返って戻るまでの間(※1)は、待機する仕組みになります。 (※1)または魚探本体が信号が消失(ロスト)と判断するまでの間。 つまり水深が浅ければ跳ね返りも早く、すぐに次の発信を行うことは出来ますが、水深が深くなると受信までの時間が遅くなっていき、次の発信までの間隔が開いて、取得できる情報量も少なく鮮明さを欠けてしまうという問題が生じます。 |
|
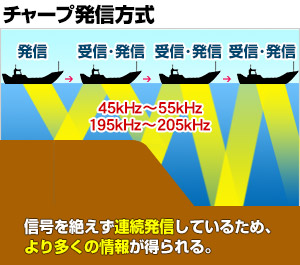
チャープ発信方式とは?
チャープ魚探で使われる発信方式は一定の領域の周波数を波のように変化させながら発信し続けます。メーカーや使用する振動子によって周波数帯が異なりますが、ガーミンGPS魚探の1モデルを例に挙げると低周波域45〜55kHz、高周波域195〜205kHzを同時に発信し、しかも水深が深くなっても信号の戻りを待たずに途切れることなく発信をし続けられるので、チャープ魚探は深い場所でも絶えず情報を得ることが可能になります。 |
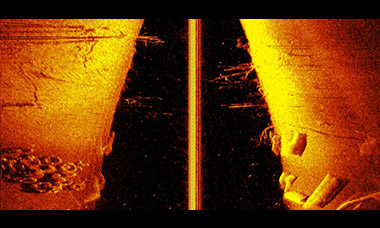
指向角が狭くなるため魚の反応を捉え難くなりますが、水草(流木)や岩等を真横から覗くかのように判別ができ、魚の住処の特定や底質の判別に使います。
また、超音波の発射方向を真下からボートの両サイドまでの広い範囲に向けたサイドスキャンがあり、こちらは広範囲の探査に利用します。
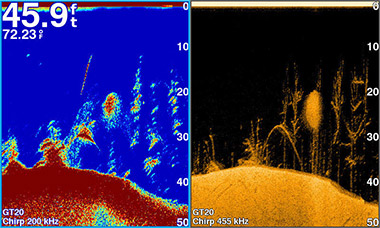
左は通常モード、右はダウンスキャン
|
サイドスキャン
|

|
海底付近を拡大表示して、ボトムに張り付くように棲息している魚の群れや底質を判断しやすくします。 起伏が大きな場合は海底部分を見失わないように追尾拡大(オート拡大)機能を使用すると良いです。 [画面右が海底拡大画像]追尾拡大は拡大画像で海底がいつも表示させるように深度を自動で変化させる機能です。 |
| Aモードとは、魚探画像の右側に表示され、音波の反射信号の強弱によって強い反応は幅広く、弱い反応には幅が狭く変化します。 現時点の反応の強さの度合いが見えやすく、魚種の種類や海底などの判断が容易になります。 |
| 他船の魚探からの干渉雑音や気泡、電気的雑音などの非同期なノイズ(雑音)を除去してきれいな画像を表示します。 |

|
海底(ボトム)付近は音波の反射が強く、通常、濃い色調で表示されますが、この部分の色を抜いて白く表示することで海底付近に着いている魚群を判別し易くなります。 画面左がホワイトラインON状態。右は海底固定拡大です。 |
ARコートがされていると直射日光下でも画面の乱反射が起こりにくく、クリアな視界が保てます。
PCでも近年流行している表面がツルツルの液晶画面もこれと同じです。
とてもコストのかかる技術なので、メーカーによっては片面のみARコート処理をしているものもあります。
グレードの低いものはコーティング皮膜が弱いため、乾いた布で画面を拭くうちに剥がれてくるトラブルもあるようです。
近くで操作するのでいらないと思う方もいるかもしれませんが、ボートの中では思うほど自由に動き回れないので、ある方が便利です。
赤外線リモコンが標準装備されているモデル。
夜間でも背面照明があればはっきりと見える他にも、昼間の屋外で視認し辛い液晶画面もバックライトの光が強いほ ど見やすくなります。
 GPS魚探でよくあるQ&A
GPS魚探でよくあるQ&A
| A1 | プレジャー用の振動子には大きく分けて2種類のタイプがあります。 |

|
丸型振動子
▶ホンデックスTD28、▶フルノ520-5PSDといった丸型振動子は、船底貼付やインナーハル取付といった簡単に取り付けることが出来るためプレジャー用として最も広く使われています。船底貼付やインナーハル取付方法はFRP艇(単層10mm以下)の船底に有効ですが、デメリットとして超音波が船底を通過するときに減衰するため深くまで探知したい場合には適しません。 しかし、リガーマリンが2013年に開発した▶スカッパーに装着できるスルハルキットでの取付方法であれば、デメリットである超音波の減衰することなく受信ができます。 |

|
トランザム(スキマー)振動子
FRP艇でも二重層や船底貼り付けが難しい構造の場合、または深くまで探知したい場合には▶ホンデックスTD-25といったトランザム(スキマー)振動子を使い船尾に取り付けます。トランザムへの取り付けは、船外に振動子を取り付けるため超音波の信号は減衰することなく受信が出来ます。 デメリットとしてスクリューや船体から発生する気泡は超音波を通過せずに反射させる性質があり、走航中などで魚探の海面付近にクシ状の反応が現れることがあります。 そのため振動子を気泡が発生する場所を避けて取り付ける必要があります。 |
フルノの魚探機能の一つ、底質判別機能は船底貼付やインナーハルでは超音波の減衰によって正確な解析ができないことから、フルノではトランサム取付または前述の▶スカッパーに装着できるスルハルキットを薦めています。
| A2 |
GPSアンテナ内蔵モデルと外付モデルはアンテナ受信性能は全く変わりはありません。 ただしGPS魚探本体の周辺にはGPS衛星からの電波受信を遮る物があると精度が悪くなる、もしくは測位出来ない場合があるため、その様な場所近くで使用するには外付けアンテナモデルをオススメします。 アンテナ内蔵モデルの取り付けには・・・
また本体の設置角度を25°以上寝かせると受信しくくなるため、なるべく垂直に近い状態で使用して下さい。 |
| A3 |
魚群探知機はデジタルと表記された魚探と表記のない従来の魚探(アナログ魚探)に分けられます。 カメラで例えると、ネガフィルムを使うアナログカメラでは複雑なデータ補正が出来なかったのに対し、デジタルカメラに移り変わってから明暗や色といったデータ補正が出来るようになった事と同じで、デジタル魚探とは受信した信号をデジタル化し本体内に保存することで、そのデータを使って鮮明な画像表現やデータ解析などアナログ魚探では出来なかった情報を表現することが出来る機能です。 メーカーによって機能は様々ですが、お魚サイズの表示、泥・砂・岩といった底質判別機能、ノイズの除去機能の強化、水深の深いエリアの鮮明化、全画面感度変更などが挙げられます。 |
| A4 |
両者メリットがあります。
横型は時間経過とともに魚探の反応が履歴として横スクロールしていきます。画面からすこし目を離しても魚の反応がしばらく残せます。 縦型は水深が深い時のズーム機能を使うときに役立ちます。根付き魚を狙うばかり、海底中心にズームをしていると画面の縦サイズが短いと 海底から離れた魚がいても画面の外で見逃す原因になります。 また、ホンデックスの製品の中には縦横置きが切り替えのできるモデルがありますが、横置き以外で置くと内蔵のGPSアンテナが動作しなくなります。 ※縦型、横逆置きにする場合には外部アンテナをご使用ください。 |
| A5 |
日本測地系"TOKYO"は2001年までに使われていた緯度経度の座標基準として使われていましたが、現在の主流は世界測地系"WGS-84"が使われています。
雑誌やネットからの情報などから得られる座標も世界測地系"WGS-84"を基にされているため、日本測地系"TOKYO"の設定で雑誌などから座標を登録すると大きく誤差が生じます。 日本測地系"TOKYO"を使用するケースとしては2001年以前のGPSプロッター機器といった日本測地系"TOKYO"設定を基準にした座標データを登録する時にだけにしてください。 |
|
GPS魚群探知機の基礎知識はいかがでしたでしょうか? もしまだわからないことがあれば、当店取り扱いメーカーに限りますが回答いたします。 専用フォームよりお問合せください。 |
| 取扱メーカー | GARMIN・HONDEX・FURUNO・YAMAHA・HUMINBIRD・KODEN |